#include <unistd.h>
#include <errno.h>
#include <stdlib.h>
#include <string.h>
#include <pthread.h>
#include "errlog.h"
#include "cantProceed.h"
#include "epicsSpin.h"
Go to the source code of this file.
| #define checkStatus |
( |
|
status, |
|
|
|
message |
|
) |
| |
Value: (message), strerror((
status))); \
}
int errlogPrintf(const char *pFormat,...)
Definition at line 34 of file osdSpin.c.
Definition at line 115 of file osdSpin.c.
119 spin = calloc(1,
sizeof(*spin));
123 status = pthread_mutex_init(&spin->
lock,
NULL);
#define checkStatus(status, message)
Definition at line 135 of file osdSpin.c.
138 status = pthread_mutex_destroy(&spin->
lock);
#define checkStatus(status, message)
Definition at line 144 of file osdSpin.c.
147 status = pthread_mutex_lock(&spin->
lock);
LIBCOM_API void cantProceed(const char *msg,...)
#define checkStatus(status, message)
Definition at line 173 of file osdSpin.c.
177 cantProceed(
"epicsSpinMustCreate: epicsSpinCreate failed.");
LIBCOM_API void cantProceed(const char *msg,...)
epicsSpinId epicsSpinCreate(void)
Definition at line 153 of file osdSpin.c.
156 status = pthread_mutex_trylock(&spin->
lock);
#define checkStatus(status, message)
Definition at line 163 of file osdSpin.c.
166 status = pthread_mutex_unlock(&spin->
lock);
#define checkStatus(status, message)

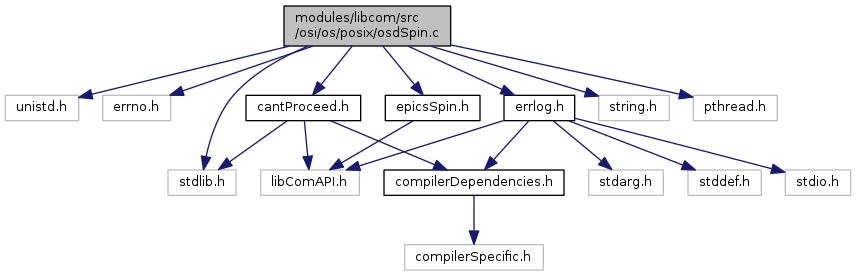
 Include dependency graph for osdSpin.c:
Include dependency graph for osdSpin.c: 1.8.11
1.8.11