#include <stdlib.h>
#include "cantProceed.h"
#include "errlog.h"
#include "epicsMutex.h"
#include "epicsSpin.h"
Go to the source code of this file.
Definition at line 28 of file osdSpin.c.
31 spin = calloc(1,
sizeof(*spin));
#define epicsMutexCreate()
Create an epicsMutex semaphore for use from C code.
Definition at line 54 of file osdSpin.c.
void epicsStdCall epicsMutexDestroy(epicsMutexId pmutexNode)
Destroy an epicsMutex semaphore.
Definition at line 59 of file osdSpin.c.
64 errlogPrintf(
"epicsSpinLock(%p): epicsMutexLock returned %s\n", spin,
66 "epicsMutexLockTimeout" :
"epicsMutexLockError");
int errlogPrintf(const char *pFormat,...)
epicsMutexLockStatus epicsStdCall epicsMutexLock(epicsMutexId pmutexNode)
Claim the semaphore, waiting until it's free if currently owned owned by a different thread...
Definition at line 46 of file osdSpin.c.
50 cantProceed(
"epicsSpinMustCreate: epicsSpinCreate failed.");
LIBCOM_API void cantProceed(const char *msg,...)
epicsSpinId epicsSpinCreate(void)
Definition at line 70 of file osdSpin.c.
77 errlogPrintf(
"epicsSpinTryLock(%p): epicsMutexTryLock returned epicsMutexLockError\n", spin);
int errlogPrintf(const char *pFormat,...)
epicsMutexLockStatus epicsStdCall epicsMutexTryLock(epicsMutexId pmutexNode)
Similar to epicsMutexLock() except that the call returns immediately, with the return status indicati...
Definition at line 81 of file osdSpin.c.
void epicsStdCall epicsMutexUnlock(epicsMutexId pmutexNode)
Release the semaphore.

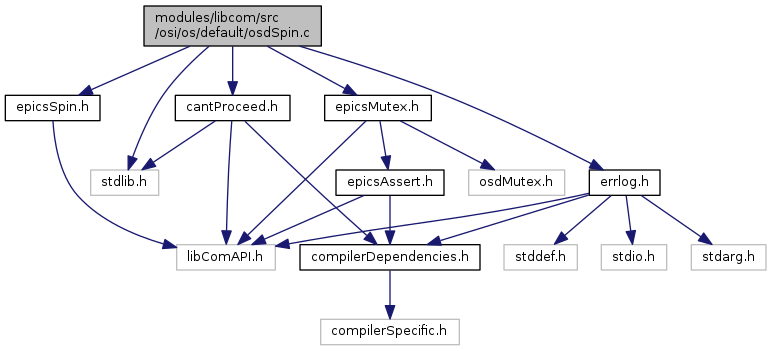
 Include dependency graph for osdSpin.c:
Include dependency graph for osdSpin.c: 1.8.11
1.8.11